(Disclaimer—Mears is an old neighbor/friend from my days in Colorado and is known to have once thrown an excellent murder mystery who-done-it-party. Turns out my wife was the caper. But that’s another story.)
Course Search and Signal Acquisition
The High Route: Earlier, we posted an article on The High Route discussing signal acquisition in transceivers. So, let’s talk about that and folks practicing that in the field. Essentially, we want to explore why it is important to go out and practice when the sending beacon is in numerous orientations. Let’s begin with what you folks refer to as the optimal orientation for the sending transceiver.
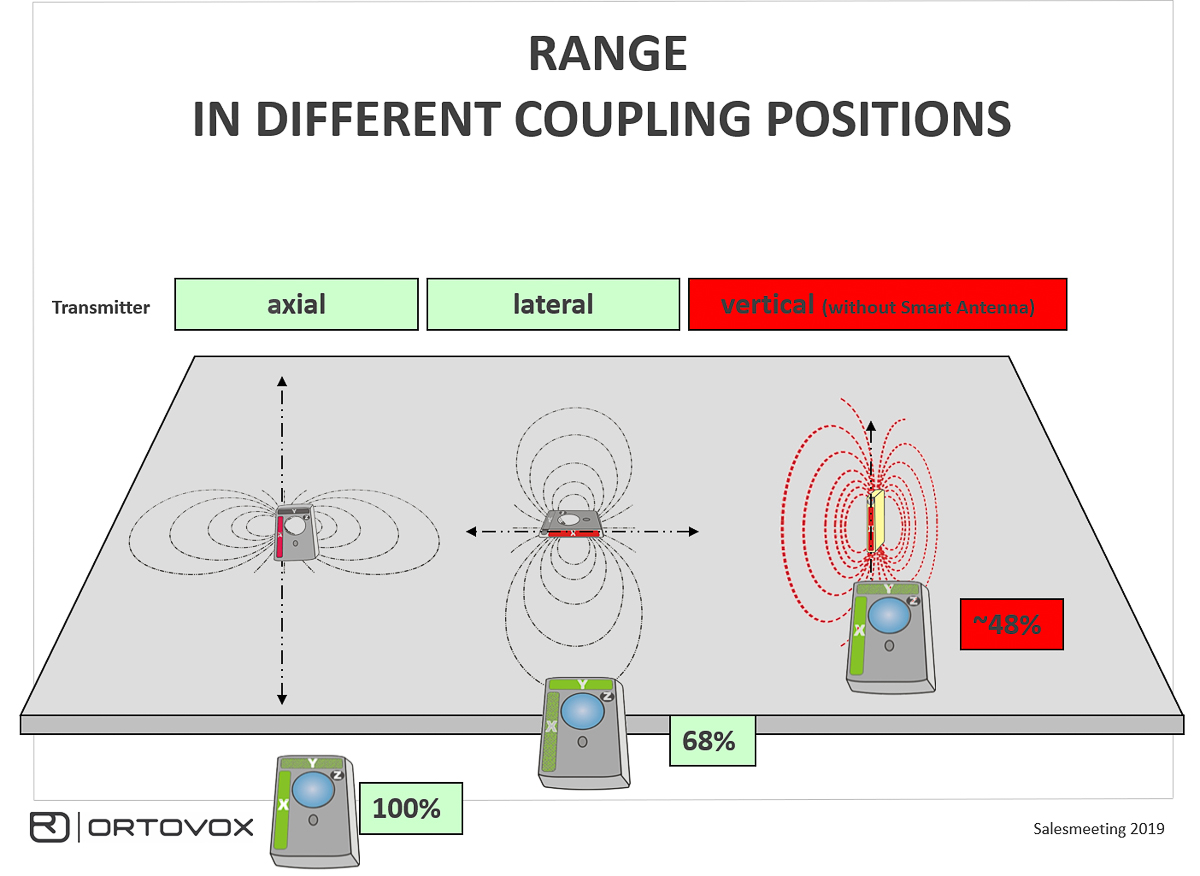
Mears: The optimal orientation is called parallel alignment. The antennas, in the search and sending transceiver, point towards each other rather than being perpendicular to one another. When you are in a parallel, or optimal alignment, we expect to acquire the signal under the optimum range of your device.
In an ideal scenario, in a quiet electromagnetic situation (no EMI), and the sending transceiver is positioned in its optimal orientation, the receiving transceiver should acquire a signal at the high end of the signal acquisition range. For example, if the receiving transceiver is the DIRACT VOICE, the maximum search range is 50m (search strip width)—in the optimal orientation, signal acquisition should occur around 30-40 meters (equivalent flux line distance).



